⚙️ Hydraulic Motor Torque Calculator
Calculate actual output torque, flow rate, efficiency, and power for hydraulic motors
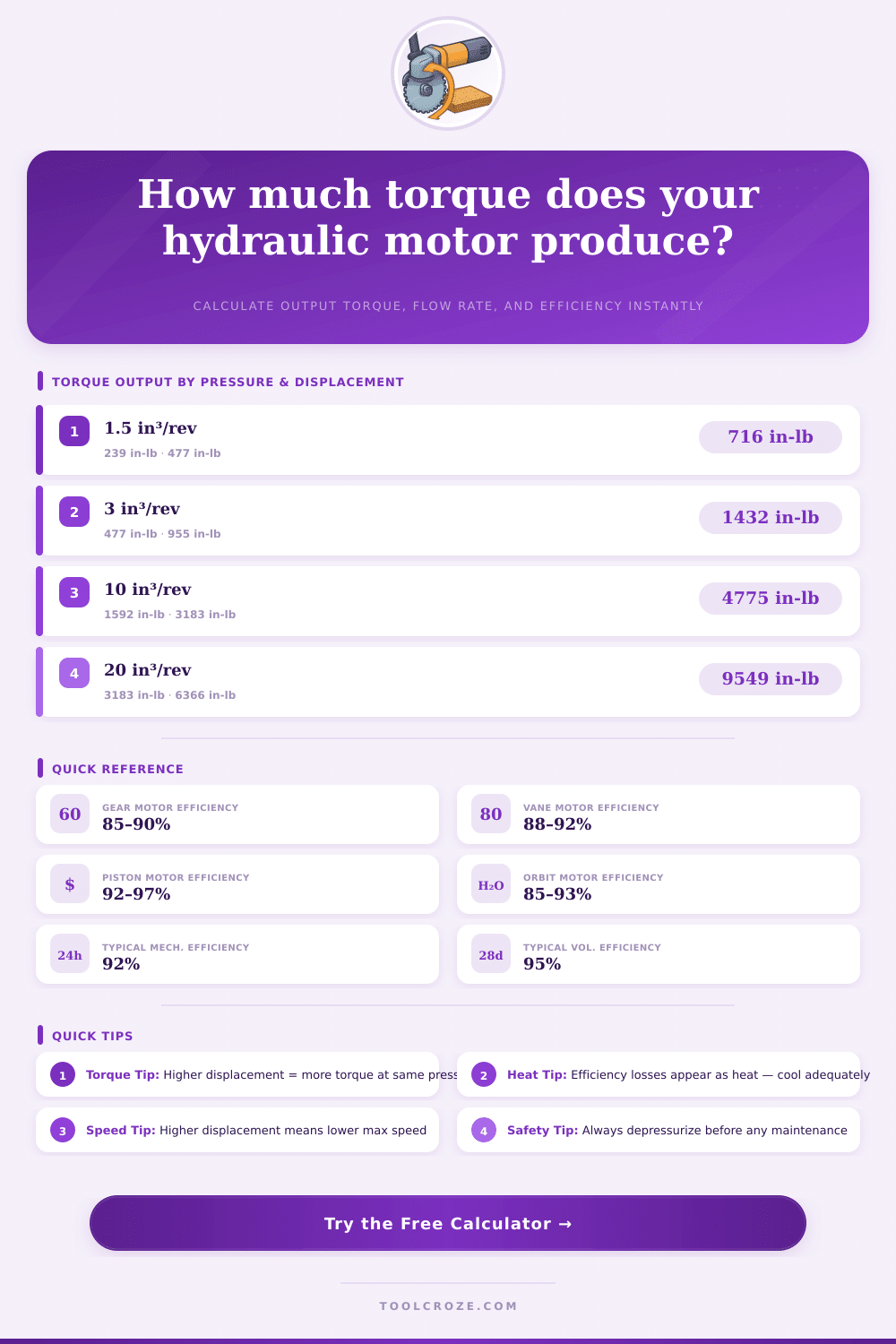
| Displacement | 1000 PSI | 2000 PSI | 3000 PSI |
|---|---|---|---|
| 0.5 in³/rev | 73 in-lb / 6.1 ft-lb | 146 in-lb / 12.2 ft-lb | 220 in-lb / 18.3 ft-lb |
| 1.5 in³/rev | 220 in-lb / 18.3 ft-lb | 439 in-lb / 36.6 ft-lb | 659 in-lb / 54.9 ft-lb |
| 3 in³/rev | 439 in-lb / 36.6 ft-lb | 878 in-lb / 73.2 ft-lb | 1317 in-lb / 109.8 ft-lb |
| 10 in³/rev | 1464 in-lb / 122 ft-lb | 2928 in-lb / 244 ft-lb | 4392 in-lb / 366 ft-lb |
| 20 in³/rev | 2928 in-lb / 244 ft-lb | 5856 in-lb / 488 ft-lb | 8784 in-lb / 732 ft-lb |
| 50 in³/rev | 7320 in-lb / 610 ft-lb | 14639 in-lb / 1220 ft-lb | 21959 in-lb / 1830 ft-lb |
| Motor Type | Displacement Range | Efficiency | Best Use |
|---|---|---|---|
| Gear Motor | 0.1–100 in³/rev | 85–90% | General purpose, low cost |
| Vane Motor | 0.5–50 in³/rev | 88–92% | Moderate torque, smooth operation |
| Piston Motor | 0.2–200 in³/rev | 92–97% | High performance, variable speed |
| Orbit (Gerotor) | 5–500 in³/rev | 85–93% | Low speed, high torque applications |
| Displacement | 500 RPM | 1000 RPM | 2000 RPM | 3000 RPM |
|---|---|---|---|---|
| 1.5 in³/rev | 3.4 GPM | 6.8 GPM | 13.7 GPM | 20.5 GPM |
| 3 in³/rev | 6.8 GPM | 13.7 GPM | 27.3 GPM | 41.0 GPM |
| 10 in³/rev | 22.8 GPM | 45.5 GPM | 91.1 GPM | 136.6 GPM |
| 20 in³/rev | 45.5 GPM | 91.1 GPM | 182.2 GPM | 273.3 GPM |
Hydraulic motors work as rotary drives that change hydraulic energy to mechanical torque. They use the pressure and flow that a hydraulic pump provides to convert that energy into spinning that helps move many kinds of machines.
torque has a truly key role for hydraulic motors. It decides how well they can do various jobs. Enough torque is needed to beat loads, start machines up and keep stable spinning speed.
How Torque Affects Hydraulic Motors
Without the right amount of torque, a motor simply can not do its task well.
Many kinds of hydraulic motors exist. One common type is those with low speed and high torque. One finds also motors for high speed, wheel motors, rotary dirves and mixes of even pump with motor.
Some of them have high power density, for instance axial piston motors, while others are built with high torque density, like orbit motors or radial piston motors.
The series BMMa represent one example of compact, high-performance design with low speed and high torque. It uses a valve to distribute the flow and works in parallel or serial systems.
To estimate the created torque of a hydraulic motor, one uses a simple formula. One takes the value in PSI, multiplies it by the shift of the motor, then divides by twice pi. That results in torque measured in inch-pounds.
For instance, 3000 psi multiplied by 0.25 cubic inches for one revolution, divided by 6.283, gives around 119.4 inch-pounds, witch is about 13.5 Nm.
The stall torque of hydraulic motors depends on their volume shift per revolution and on the pressure in the system. In hydraulics, one can turn load into pressure. Torque forms a link between shift per revolution and resistance of the load.
Also the efficiency of the motor is important. In hydraulic motors, efficiency normally sits between 0.85 and 0.95. A program calculator helps engineers quickly compute the output of torque, spinning speed and power based on shift, pressure, flow rate and efficiency.
torque also affects the flow rate in a hydraulic system. The torque of the motor decides how well the pump will beat the resistance of the system and will keep the flow. In a system with fixed shift, when the load grows, the electric motor that moves the pump slows a bit and then takes more power.
That causes the motor to make less torque at bigger loads.
It is important to choose a motor size right for the task. If the motor lacks enough shift, it could stop because of lack of torque before reaching full ability. Making the hydraulic pump bigger to match the available horsepower can let the system reach max pressure, but the tradeoff is slower spinning.
Torque, pull andhorsepower all add to the movement of motors and are closely tied one to the other in final drive uses.