⚙ Gear Motor Torque Calculator
Calculate output torque, speed, and efficiency for any gearmotor configuration
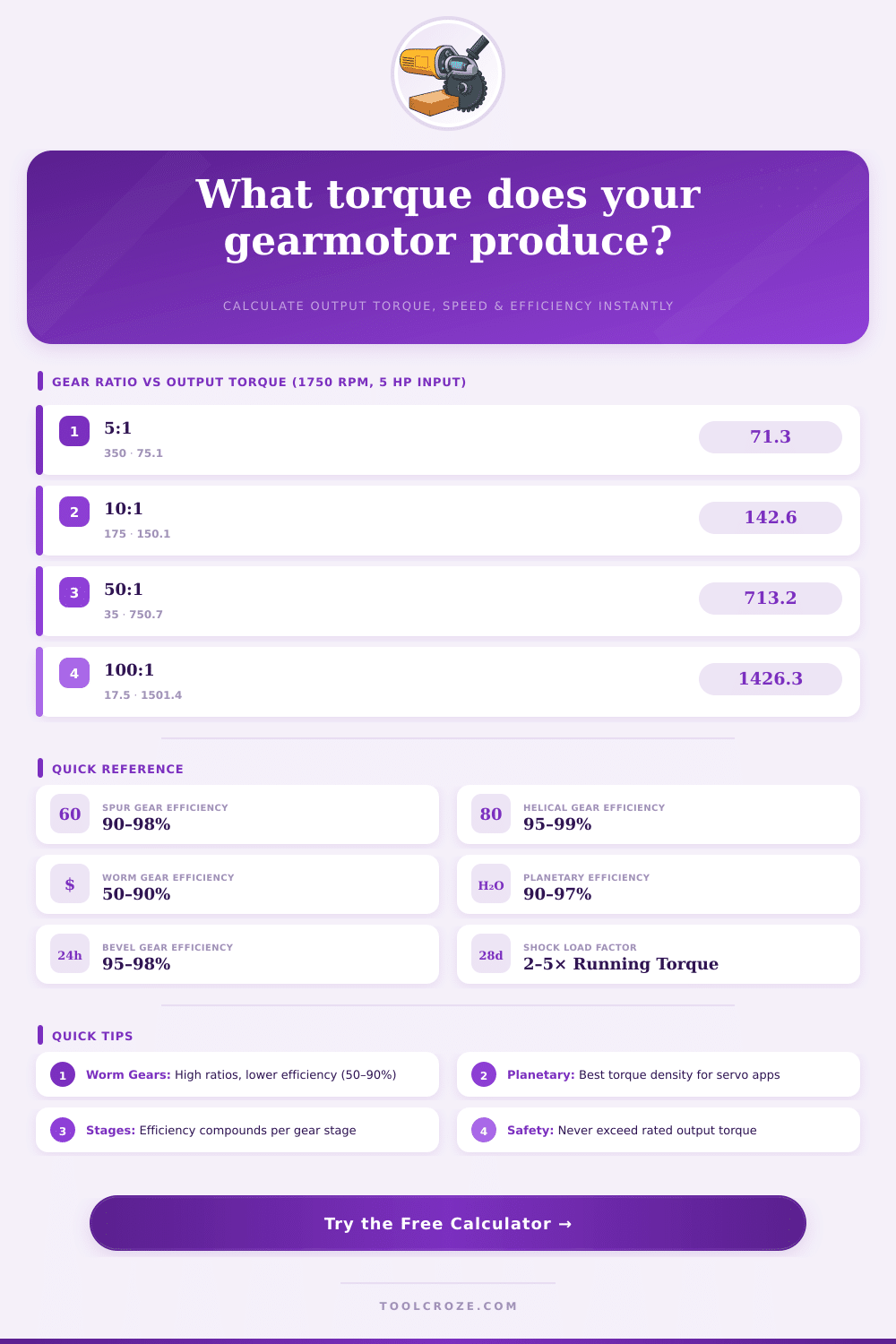
| Gear Ratio | Output Speed (RPM) | Input Torque (ft-lb) | Theoretical Output (ft-lb) | At 95% Eff (ft-lb) |
|---|---|---|---|---|
| 5:1 | 350 | 15.0 | 75.1 | 71.3 |
| 10:1 | 175 | 15.0 | 150.1 | 142.6 |
| 20:1 | 87.5 | 15.0 | 300.3 | 285.3 |
| 50:1 | 35 | 15.0 | 750.7 | 713.2 |
| 100:1 | 17.5 | 15.0 | 1501.4 | 1426.3 |
| 200:1 | 8.75 | 15.0 | 3002.9 | 2852.7 |
| Type | Ratio Range | Efficiency | Backlash | Best Use |
|---|---|---|---|---|
| Spur Gear | 1:1 – 6:1 per stage | 90–98% | Moderate | Simple, low-cost drives |
| Helical Gear | 3:1 – 10:1 per stage | 95–99% | Low-Moderate | Smooth, quiet, high-power |
| Worm Gear | 5:1 – 100:1 per stage | 50–90% | Low | High ratio, self-locking |
| Planetary | 3:1 – 12:1 per stage | 90–97% | Very Low | Servo, high torque density |
| Bevel Gear | 1:1 – 6:1 per stage | 95–98% | Low | Right-angle drives |
| Stages | 95%/stage (Helical) | 90%/stage (Spur/Planetary) | 80%/stage (Worm) |
|---|---|---|---|
| 1 | 95.0% | 90.0% | 80.0% |
| 2 | 90.3% | 81.0% | 64.0% |
| 3 | 85.7% | 72.9% | 51.2% |
The torque of engine commonly seems to be something mysterious notion that is thrown around, but truly it is very simple, if you truly think about it. In the base, torque simply is rotary force (think about arm wrestling), where the more strongly the engine pushes against you, the bigger it is. From physical view, you have force multiplied by the distance of the pivot point.
Newton-metres form the standard unit for this.
What Is Torque and How Gear Motors Trade Speed for Force
The main target of a gear motor consist in exchange speed against force. The reducer accept the rotations from the engine and exchange them for raw pushing energy at the output finish. It forms clear trade-off, you lose rpm on one step, win torque on the contrary.
Assume, that the engine twists at 3 000 rpm and you tie a reducer with 30:1 relation. The output shaft then moves at only 100 rpm, but the torque grows by factor 30.
Here happens the truth of the cause: little gears can not push a lot. When that energy strikes big gear with more surface for work, you sharply have more torque than the engine itself could last. For instance, little gear connects with twice bigger.
The big twists only half for every full rotation of the engine. That shows the law in practice.
To count the torque of a gear motor, everything depends on two elements: power and pace. The core formula does not have secrets. You take the horsepower of the engine, multiply it by 5252, divide by the RPM, then multiply by the relation of the reducer, and get the torque in lb-ft.
In metric system it is even more basic. Power in watts matches torque in Newton-metres divided by angular pace in radians per second, what gives the necessary value.
Here commonly folks make mistakes: the ratings of torque for reducers are not only advice. Makers set those limits according to what the reducer truly can last without damage. They base on the internal structure and the strength of the hole building.
Curves of motor activity does not tell a lot about those bars, because they simply show what the engine theoretically fits to do alone.
Various tasks require different relations, never two cases are same. Cars apply between 3 and 6:1 for gears, give or take. Robotics go to extremes, commonly with 50 until 200:1 by means of planetary or harmonious drive, to squeeze the needed torque.
Each gear stage tips a bit of efficiency, so good quality bearings, proper lube and firm tooth profiles matter truly. Bigger output torque stresses more the parts; teeth, shafts, bearings, so materials and safety margins must not be ignored. Push too strongly and you break the whole engine.
On the other hand, tie high relation with modest gear motor and itoperates well for more lightweight uses, without creating mess.