⚙️ Motor Torque to Linear Force Calculator
Convert motor torque to linear force for rack & pinion, lead screw, belt drive, wheel, and lever mechanisms
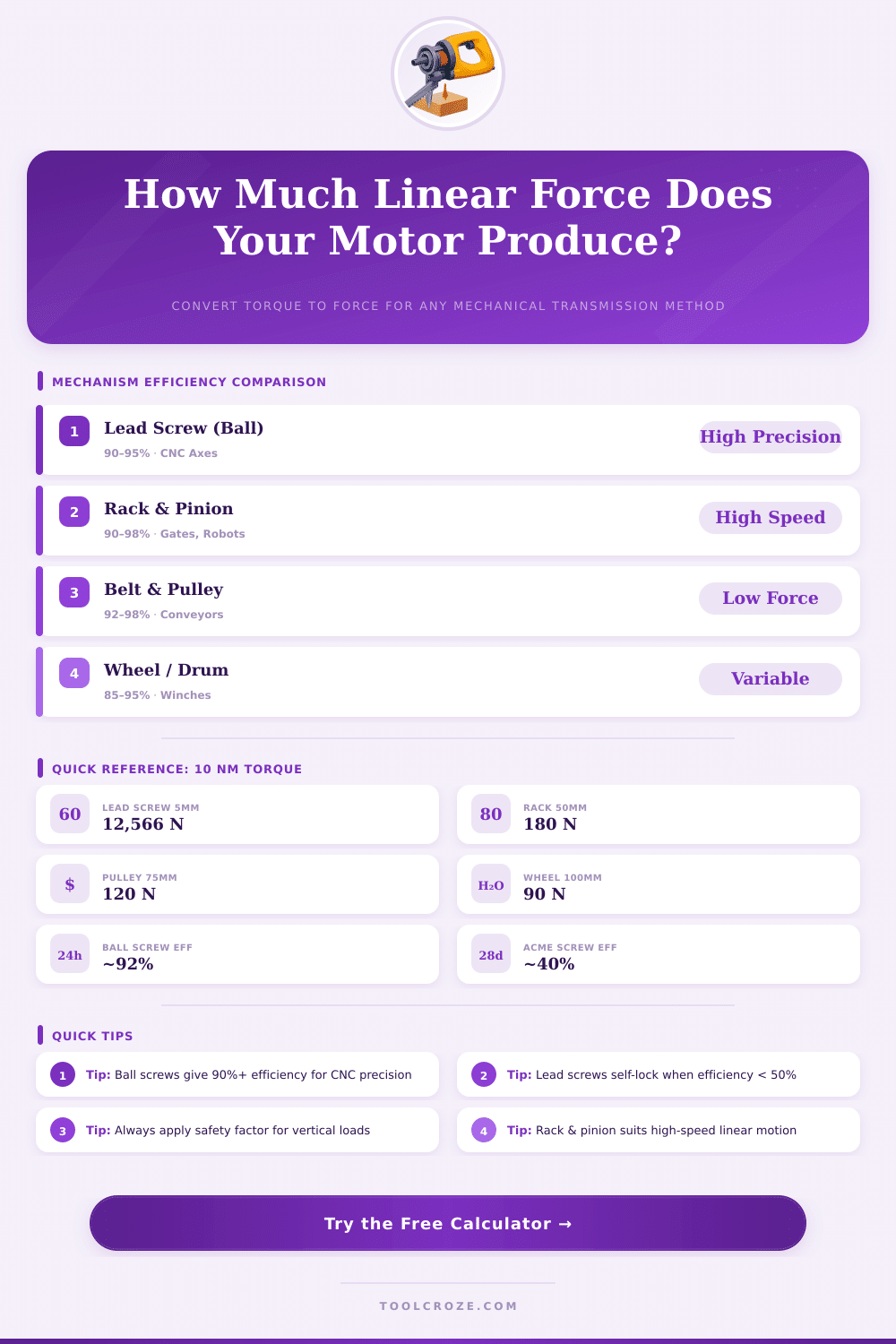
| Mechanism | Efficiency Range | Typical Application | Force Multiplication |
|---|---|---|---|
| Lead Screw (Ball) | 90–95% | CNC machine axes, 3D printers | Very High (F = 2πT/lead) |
| Lead Screw (ACME) | 30–60% | Manual machines, vices, jacks | High (self-locking possible) |
| Rack & Pinion | 90–98% | Gates, linear robots, gantries | Medium (F = T/r) |
| Belt & Pulley | 92–98% | Conveyors, linear actuators | Medium (F = T/r) |
| Wheel / Drum | 85–95% | Winches, cable drives | Medium (F = T/r) |
| Lever Arm | 95–99% | Toggle clamps, press tools | Variable by arm length |
| Screw Type | Lead Angle | Efficiency (%) | Self-Locking? |
|---|---|---|---|
| Ball Screw | Any | 90–95% | No |
| ACME Fine Pitch | 3–8° | 30–45% | Yes |
| ACME Coarse Pitch | 8–15° | 45–60% | Borderline |
| Trapezoidal | 5–12° | 35–55% | Often Yes |
| Square Thread | 10–20° | 60–75% | Sometimes |
5mm lead
50mm pinion
75mm radius
100mm radius
| RPM | Lead Screw 5mm | Lead Screw 25mm | Rack 50mm pinion |
|---|---|---|---|
| 100 RPM | 8.3 mm/s | 41.7 mm/s | 524 mm/s |
| 300 RPM | 25 mm/s | 125 mm/s | 1,571 mm/s |
| 600 RPM | 50 mm/s | 250 mm/s | 3,142 mm/s |
| 1000 RPM | 83 mm/s | 417 mm/s | 5,236 mm/s |
| 3000 RPM | 250 mm/s | 1,250 mm/s | 15,708 mm/s |
motor torque is rotary force, think about it as a turning version of pushing or pulling something. The most interesting part is that torque does not necessarily need motion to exist. One can observe torque that stays entirely still, if some object pushes back against it with the same strength.
Because torques act in a particular direction, one measures them with newton-metres or pound-feet.
How Torque Motors Work
A torque motor forms a special kind of direct-current electrical motor, designed to continuously operate even during full stop, without danger of damage. In such state it only delivers permanent rotary force to everything that is tied to it. They are made up of motors with permanent magnets, that twist along an axis.
Really, what drives an electrical motor is torque, not power. Power simply points out how quickly one gets work done, so the done work in a certain tiem, and one measures it with watts or horsepower.
What identifies torque motors is their ability to make strong torque at low speeds, even while they stand still. Really, that impresses quite a lot. Rather than usual motors, pick the right torque motor based on pure needs about torque, not on specs of power.
One considers peak torque, that marks the biggest force that the motor can physically handle, and then continuous torque, that it can give without stopping.
Those motors can move loads directly, without need of parts like worm gears, belts or pulleys. Their build naturally creates a lot of rotary force, although that brings a compromise, their RPM reaches a limit. One can combine strong torque motors with systems four precise control, similarly to servomotors, although the basic form and internal structure differs a lot.
Torque decides how much load or mass a motor can really move, while RPM rules the speed of turning. In heavy and important uses torque always beats speed. Peak torque commonly happens at zero speed, and one uses it for engineering calculations about boost.
Practically, the torque of a motor starts at maximum and slowly drops to nothing as pace grows, all because of resistance of counter-torque and air, that works against the rotor.
Torque motors appear in several types, low, high, permanent, variable, with high torque density and versions for direct torque control among them. Every kind has its own unique traits, and one chooses the one that fits the specific use.
Motors one usually rates by their constant of voltage, called Kv, that gets its value from dividing RPM by voltage. There is also a constant of torque, called Kt, that works together with it. To reach real torque, the motor needs to draw a certain amount of electricity, multiply Kt by that flow, and you get newton-metres of torque.
Another way to count torque is to use the link between power, torque and angular pace; rearrange the formula, and solve for torque by dividing power by angular pace. The longer the arm of the lever stretches from the center of turning, the bigger rotary force one gets from the same push. A motor rated atone pound-foot could in theory hold a one-pound weight, hung on a one-foot pole.