🤖 Robot Motor Torque Calculator
Calculate required motor torque for wheeled robots and robotic arm joints — with gear ratio, slope, payload, and safety factor.
⚙️ Torque Analysis Results
| Gear Ratio | Torque Multiplier | Speed Multiplier | Example Use |
|---|---|---|---|
| 1:1 | 1.0x | 1.0x | Direct drive, high speed |
| 5:1 | 5.0x | 0.2x | Light robotic joints |
| 10:1 | 10.0x | 0.1x | Wheeled robots, conveyors |
| 20:1 | 20.0x | 0.05x | Heavy-duty drive |
| 50:1 | 50.0x | 0.02x | Arm joints, precision |
| 100:1 | 100.0x | 0.01x | Heavy arms, wrist joints |
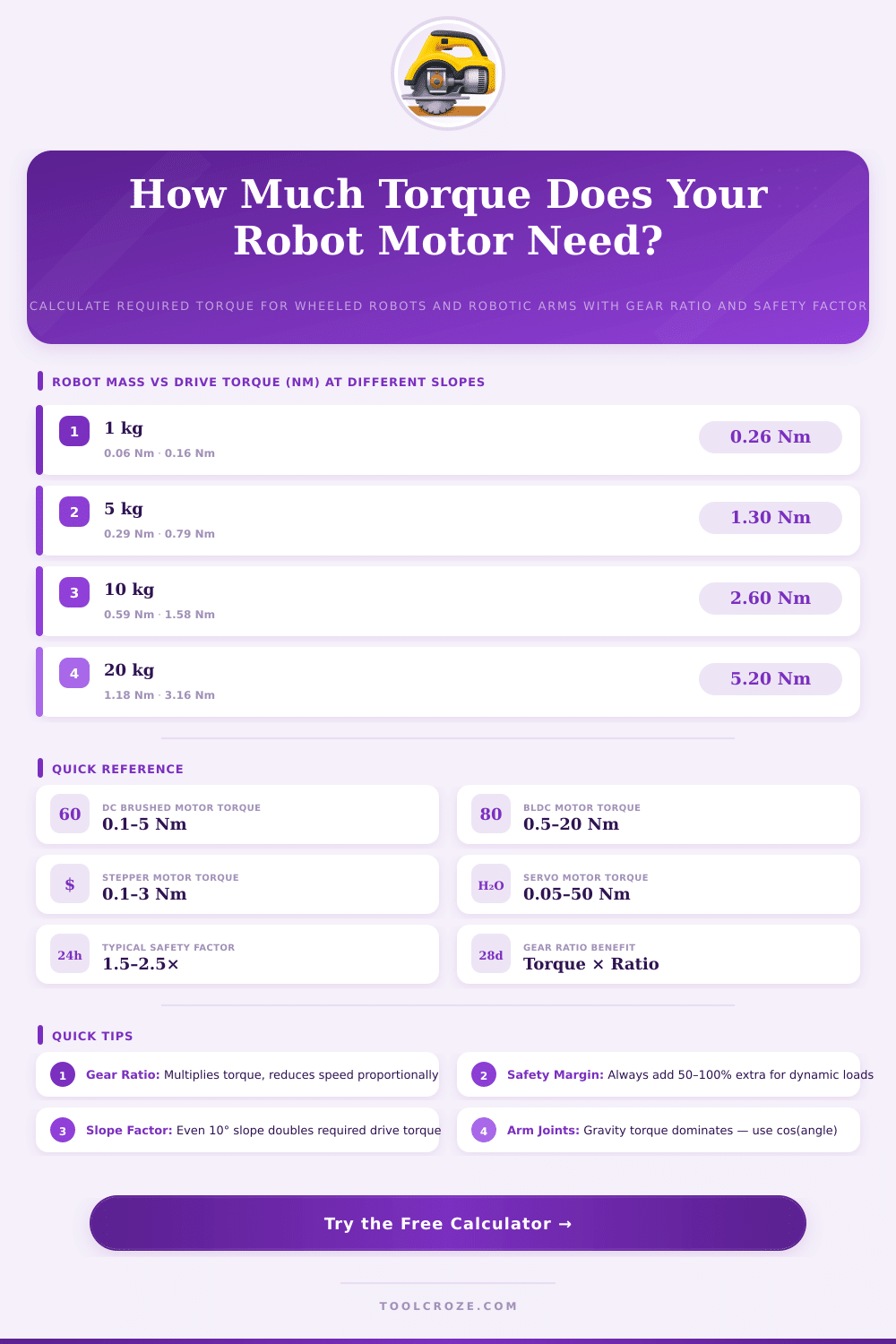
| Robot Mass | Flat (0°) | 10° Slope | 20° Slope | Friction (0.05) |
|---|---|---|---|---|
| 0.5 kg | 0.025 | 0.059 | 0.089 | 0.012 |
| 1 kg | 0.049 | 0.118 | 0.177 | 0.024 |
| 5 kg | 0.245 | 0.589 | 0.886 | 0.122 |
| 10 kg | 0.491 | 1.179 | 1.772 | 0.245 |
| 20 kg | 0.981 | 2.357 | 3.544 | 0.490 |
| 60 kg | 2.943 | 7.071 | 10.63 | 1.471 |
| Link Length | 0.5 kg payload | 1 kg payload | 2 kg payload | 5 kg payload |
|---|---|---|---|---|
| 10 cm (0.1m) | 0.74 | 1.23 | 2.21 | 5.15 |
| 20 cm (0.2m) | 1.47 | 2.45 | 4.42 | 10.3 |
| 30 cm (0.3m) | 2.21 | 3.68 | 6.62 | 15.5 |
| 50 cm (0.5m) | 3.68 | 6.13 | 11.0 | 25.7 |
At the base, robot motor devices convert electrical signals into spinning move by means of electromagnetic effects. The process itself is fairly easy: current flows pass through the coils of the engine what creates magnetic fields, that interact with fixed magnets. That interaction generates torque, that rotates the shaft and puts your robot in move.
To estimate torque, one uses a basic formula for force, simply multiply it by means of the radius of the roll. Here is where it becomes interesting: in a system with direct drive and two wheels, every engine requires only a quarter of the whole needed torque. It seems weird at first, but when it works out, the whole process of sizing engines gets much eaiser.
How Robot Motors Work: Torque, Speed and Gears
When dealing with arms for robotic machines, the situation becomes more complex. You must estimate the needed torque at every joint according to the worst positions… For instance, when it holds weight directly out at 90 degrees.
Here it matters to keep your first ratings precise. Most folks work with units like kg-cm or oz-in. If you see a servo labeled with something like 35 kg, that usually points to the maximum torque, measured in kg-cm.
Here is the thing about DC engines, what commonly confuses folks: the turns per minute without load and the maximum torque never happen at the same time. Because of that, one cannot combine them in any calculation. The good part?
With DC engines, the link between torque and speed is entirely linear. While you go down from the maximum torque until zero, the turns per minute grow from zero until the value without load.
The main element hear is power, not only the torque itself. If you multiply torque by means of turns per minute, you get the power. Really, any amount of power can move any weight, everything depends on the link between power and weight.
A small engine could drag a heavy object; it simply would move very slowly.
Want more torque from a servo? Give up a bit of speed by means of a reduction gear, like a planetary gearbox or gear set with a high ratio. A ratio of 8:1 linear reduction keeps good speed, while it lowers the needed torque.
Bigger robotic devices commonly use planetary gearboxes, that can give around 480 N-m at the output, give or take depending on the setup.
Engines with flat-spiral winding provide better heat spread, bigger efficiency and stronger torque; although the price shows that. Modern designs push the limit of links between torque and weight, just like racing cars. Studies point to engines that reach 30 Nm while using only 4.8 kW andweighing much less than their larger counterparts.
Even on a smooth, flat surface, you can meet surprises. A robot that slides on flat ground could seem fine with minimal torque, but a rock of half an inch in the way like a bump and you will find both wheels blocked. Always overestimate your needs about torque.